

python实现Canny算子边缘检测算法
边缘检测是一种将图片中关键信息表现出来的一种图片技术,它的结果并不是字面意思上的获取图片边缘,而是将图片有用的信息勾勒出来,类似素描的结果,但是已经去掉了很多信息。如下所示,一张原始的图片是这样的:

通过边缘检测算法,我们最终得到的图片可能是这样的:

虽然丢掉了颜色和很多细节,但是这张图片从轮廓山仍然可以看出是模特lenna。
边缘检测算法有很多实现方式,结果也不尽相同,其中最常见的就是Canny算子的边缘检测算法,Canny边缘检测算法大致描述如下: .
- 灰度化
- 应用高斯滤波去除噪声
- 计算图像强度梯度和方向
- 非极大值抑制 non-max-suppresion
- 双阈值跟踪边界
opencv库提供了Canny算法,可以很方便的进行边缘检测,代码如下:
import cv2
import matplotlib.pyplot as plt
img = cv2.imread('lenna.png', 0)
# 灰度
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
# 高斯滤波 卷积 3 * 3
img_blur = cv2.GaussianBlur(img_gray, (3, 3), 0)
# x梯度
xgrad = cv2.Sobel(img_blur, cv2.CV_16SC1, 1, 0)
# y梯度
ygrad = cv2.Sobel(img_blur, cv2.CV_16SC1, 0, 1)
# 使用梯度参数进行边缘检测 阈值 50 ~ 150
edge1 = cv2.Canny(xgrad, ygrad, 50, 150)
# 直接用高斯滤波结果进行边缘检测 阈值 50 ~ 150
edge2 = cv2.Canny(img_blur, 50, 150)
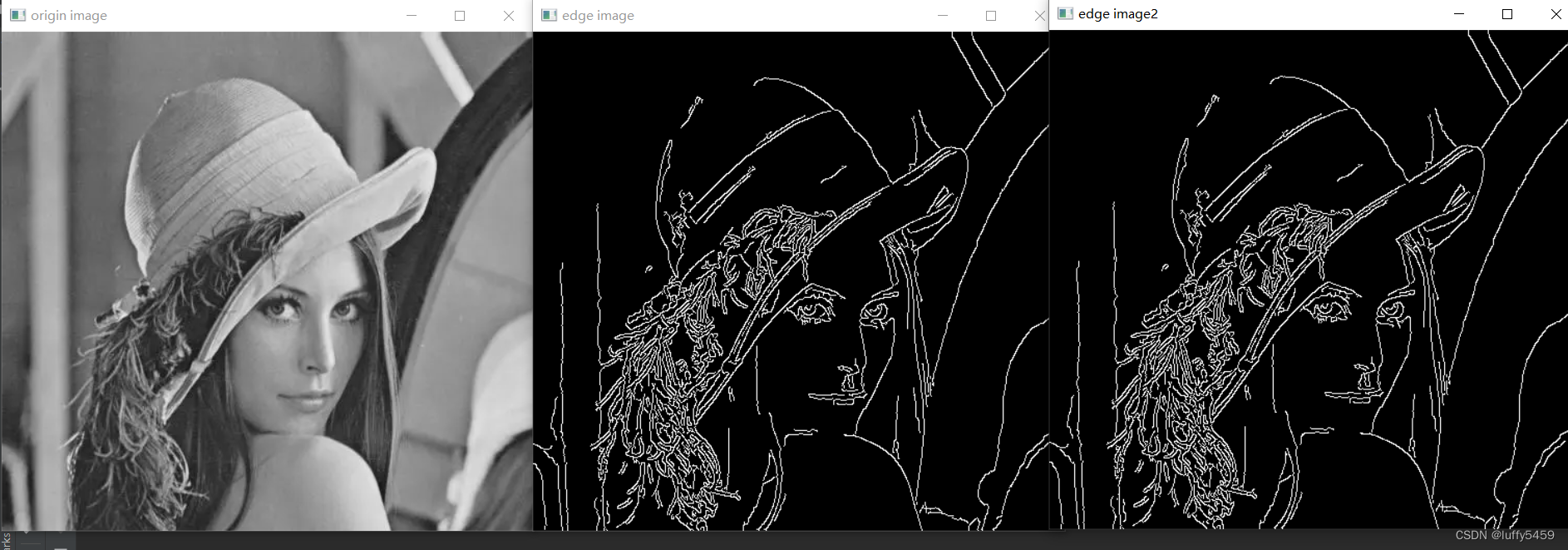
cv2.imshow('origin image', img)
cv2.imshow('edge image', edge1)
cv2.imshow('edge image2', edge2)
cv2.waitKey()
这段代码大致意思是先加载lenna.png,然后转灰度,高斯滤波平滑图片,计算梯度,使用Canny算法边缘检测。
算法运行结果:
根据上面提到的算法步骤,以及一些理论公式,其实这个有很多直接使用python代码实现的Canny算子边缘检测算法,如下所示,这些函数分别都是根据上面的算法步骤进行整理的:
import numpy as np
import math
import cv2
# 灰度化
def gray(img_path):
"""
计算公式:
Gray(i,j) = 0.299 * R(i,j) + 0.587 * G(i,j) + 0.114 * B(i,j)
"""
# 读取图片
img = cv2.imread(img_path, 0)
# BGR 转换成 RGB 格式
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
# 灰度化
img_gray = np.dot(img_rgb[..., :3], [0.299, 0.587, 0.114])
return img_gray
# 去除噪音 - 使用 5x5 的高斯滤波器
def smooth(img_gray):
# 生成高斯滤波器
"""
要生成一个 (2k+1)x(2k+1) 的高斯滤波器,滤波器的各个元素计算公式如下:
H[i, j] = (1/(2*pi*sigma**2))*exp(-1/2*sigma**2((i-k-1)**2 + (j-k-1)**2))
"""
sigma1 = sigma2 = 1.4
gau_sum = 0
gaussian = np.zeros([5, 5])
for i in range(5):
for j in range(5):
gaussian[i, j] = math.exp((-1 / (2 * sigma1 * sigma2)) * (np.square(i - 3) + np.square(j - 3))) / (
2 * math.pi * sigma1 * sigma2)
gau_sum = gau_sum + gaussian[i, j]
# 归一化处理
gaussian = gaussian / gau_sum
# 高斯滤波
W, H = img_gray.shape
new_gray = np.zeros([W - 5, H - 5])
for i in range(W - 5):
for j in range(H - 5):
new_gray[i, j] = np.sum(img_gray[i:i + 5, j:j + 5] * gaussian)
return new_gray
# 计算梯度幅值
def gradients(new_gray):
"""
:type: image which after smooth
:rtype:
dx: gradient in the x direction
dy: gradient in the y direction
M: gradient magnitude
theta: gradient direction
"""
W, H = new_gray.shape
dx = np.zeros([W - 1, H - 1])
dy = np.zeros([W - 1, H - 1])
M = np.zeros([W - 1, H - 1])
for i in range(W - 1):
for j in range(H - 1):
dx[i, j] = new_gray[i + 1, j] - new_gray[i, j]
dy[i, j] = new_gray[i, j + 1] - new_gray[i, j]
# 图像梯度幅值作为图像强度值
M[i, j] = np.sqrt(np.square(dx[i, j]) + np.square(dy[i, j]))
return dx, dy, M
def NMS(M, dx, dy):
d = np.copy(M)
W, H = M.shape
NMS = np.copy(d)
NMS[0, :] = NMS[W - 1, :] = NMS[:, 0] = NMS[:, H - 1] = 0
for i in range(1, W - 1):
for j in range(1, H - 1):
# 如果当前梯度为0,该点就不是边缘点
if M[i, j] == 0:
NMS[i, j] = 0
else:
gradX = dx[i, j] # 当前点 x 方向导数
gradY = dy[i, j] # 当前点 y 方向导数
gradTemp = d[i, j] # 当前梯度点
# 如果 y 方向梯度值比较大,说明导数方向趋向于 y 分量
if np.abs(gradY) > np.abs(gradX):
weight = np.abs(gradX) / np.abs(gradY) # 权重
grad2 = d[i - 1, j]
grad4 = d[i + 1, j]
# 如果 x, y 方向导数符号一致
# 像素点位置关系
# g1 g2
# c
# g4 g3
if gradX * gradY > 0:
grad1 = d[i - 1, j - 1]
grad3 = d[i + 1, j + 1]
# 如果 x,y 方向导数符号相反
# 像素点位置关系
# g2 g1
# c
# g3 g4
else:
grad1 = d[i - 1, j + 1]
grad3 = d[i + 1, j - 1]
# 如果 x 方向梯度值比较大
else:
weight = np.abs(gradY) / np.abs(gradX)
grad2 = d[i, j - 1]
grad4 = d[i, j + 1]
# 如果 x, y 方向导数符号一致
# 像素点位置关系
# g3
# g2 c g4
# g1
if gradX * gradY > 0:
grad1 = d[i + 1, j - 1]
grad3 = d[i - 1, j + 1]
# 如果 x,y 方向导数符号相反
# 像素点位置关系
# g1
# g2 c g4
# g3
else:
grad1 = d[i - 1, j - 1]
grad3 = d[i + 1, j + 1]
# 利用 grad1-grad4 对梯度进行插值
gradTemp1 = weight * grad1 + (1 - weight) * grad2
gradTemp2 = weight * grad3 + (1 - weight) * grad4
# 当前像素的梯度是局部的最大值,可能是边缘点
if gradTemp >= gradTemp1 and gradTemp >= gradTemp2:
NMS[i, j] = gradTemp
else:
# 不可能是边缘点
NMS[i, j] = 0
return NMS
def double_threshold(NMS):
W, H = NMS.shape
DT = np.zeros([W, H])
# 定义高低阈值
TL = 0.1 * np.max(NMS)
TH = 0.3 * np.max(NMS)
for i in range(1, W - 1):
for j in range(1, H - 1):
# 双阈值选取
if (NMS[i, j] < TL):
DT[i, j] = 0
elif (NMS[i, j] > TH):
DT[i, j] = 1
# 连接
elif (NMS[i - 1, j - 1:j + 1] < TH).any() or (
NMS[i + 1, j - 1:j + 1].any() or (NMS[i, [j - 1, j + 1]] < TH).any()):
DT[i, j] = 1
return DT
def canny(img):
img_gray = gray(img)
new_gray = smooth(img_gray)
dx, dy, M = gradients(new_gray)
nms = NMS(M, dx, dy)
return double_threshold(nms)
if __name__ == '__main__':
img_url = 'lenna.png'
img = cv2.imread(img_url)
edgedetect = canny(img_url)
img_gray = cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
img_blur = cv2.GaussianBlur(img_gray, (3, 3), 0)
cv2.imshow('origin img', img)
opencvedge = cv2.Canny(img_blur, 50, 150)
cv2.imshow('opencv edge', opencvedge)
cv2.imshow('python edge', edgedetect)
cv2.waitKey()
算法运行结果;

我们通过python算法实现的边缘检测,线条好像不是很光滑,虽然轮廓是出来了,但是线条很糙。这其实是代码里面一个计算梯度的地方正好写反了。

我们调整代码如下:
-
dx[i, j] = new_gray[i, j + 1] - new_gray[i, j]
-
dy[i, j] = new_gray[i + 1, j] - new_gray[i, j]
执行结果如下;

虽然结果与opencv Canny算法结果有些差别,但是线条明显光滑了很多,比之前的结果要好。
本站大部分文章、数据、图片均来自互联网,一切版权均归源网站或源作者所有。
如果侵犯了您的权益请来信告知我们删除。邮箱:1451803763@qq.com